| Name | Kurzbeschreibung |
|---|---|
| Bounding Volume Hierarchy | 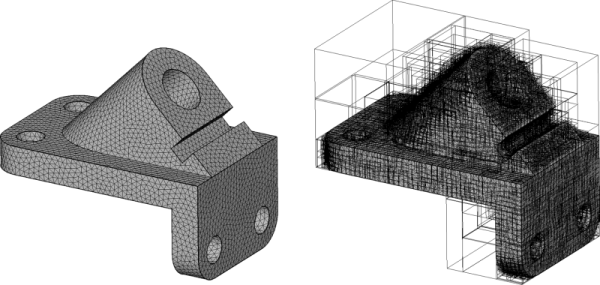 A bounding volume hierarchy. A bounding volume hierarchy. |
| Computing Optimal Polygons | 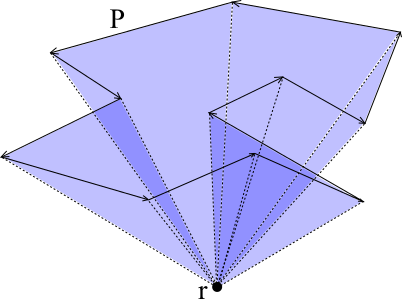 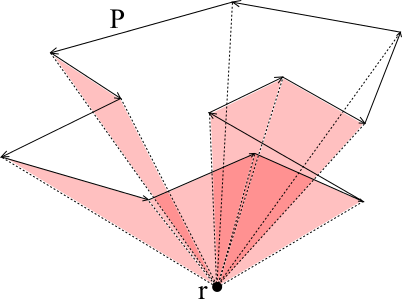 Generating Polygons. Generating Polygons. |
| Kunst! |  Exact solutions and lower bounds for art gallery problems Exact solutions and lower bounds for art gallery problems |
| Parallel Motion Planning | |
| Swarm Robots | 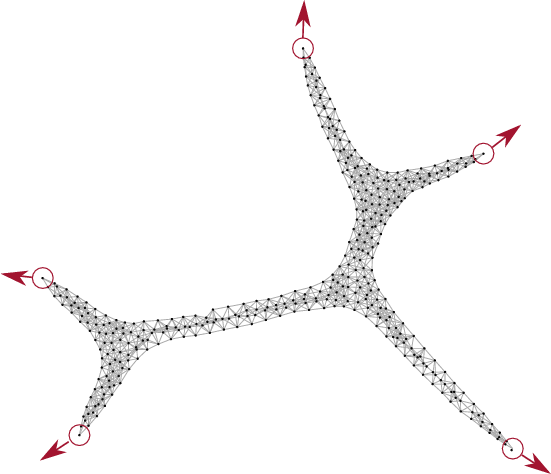 Scalable distributed algorithms for large robot swarms Scalable distributed algorithms for large robot swarms |
| Terrain Visibility |  Visibility computations in terrains. Visibility computations in terrains. |
| Tile Assembly |  Assembling polyominoes with tiles in different models. Assembling polyominoes with tiles in different models. |
| Tilt |  Controlling cell-scale robots with uniform external actuators. Controlling cell-scale robots with uniform external actuators. |