| ADVEST | Adaptive Traffic Control |
| AutoNomos | A distributed and self-regulated approach for the self-organization of a large system of many self-driven, mobile objects |
| CCC |  |
| FRONTS |  Foundations of Adaptive Networked Societies of Tiny Artefacts Foundations of Adaptive Networked Societies of Tiny Artefacts |
| Kunst! |  Exact solutions and lower bounds for art gallery problems Exact solutions and lower bounds for art gallery problems |
| Real-World G-Lab |  Real-World G-Lab Real-World G-Lab |
| RecoNodes | Rekonfigurierbare Rechensysteme |
| RoboRithmics | Algorithmical and Technical Methods for Controlling a Autonomous Exploration Robot |
| SPITFIRE | Semantic-Service Provisioning for the Internet of Things using Future Internet Research by Experimentation |
| SwarmNet | Algorithmen und Protokolle für Vernetzung und Betrieb großer Schwärme autonomer Kleinstprozessoren |
| WISEBED | Wireless Sensor Network Testbeds |
| Wiselib | A generic algorithm library for heterogeneous wireless sensor networks |
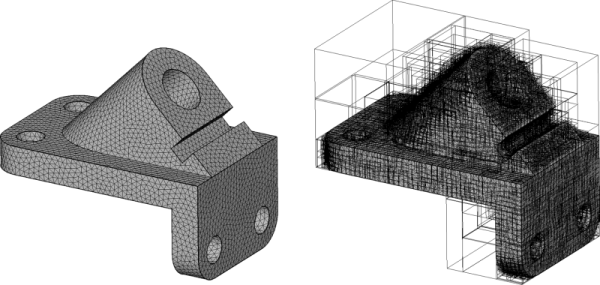 A bounding volume hierarchy.
A bounding volume hierarchy. 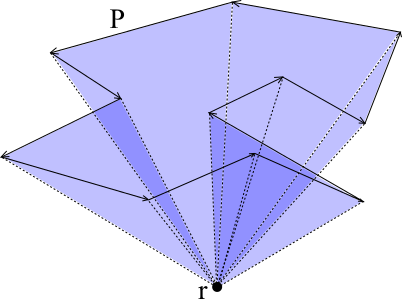
 Generating Polygons.
Generating Polygons. 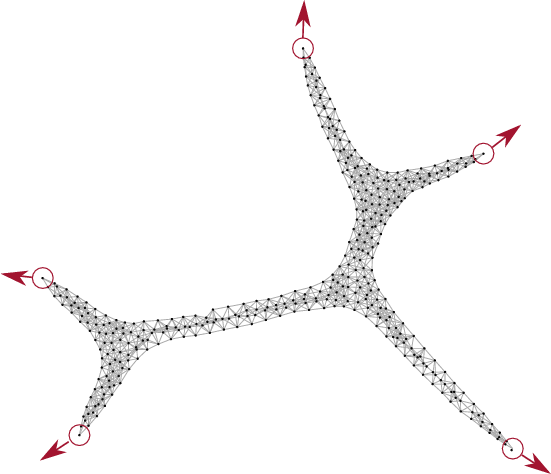 Scalable distributed algorithms for large robot swarms
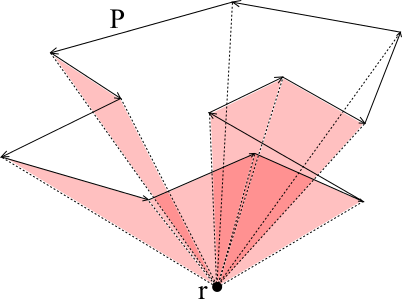
Scalable distributed algorithms for large robot swarms  Visibility computations in terrains.
Visibility computations in terrains. 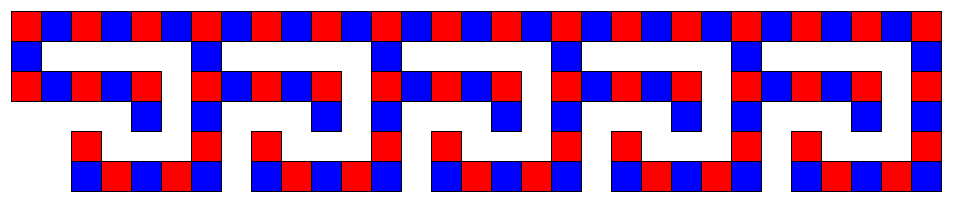 Assembling polyominoes with tiles in different models.
Assembling polyominoes with tiles in different models.  Controlling cell-scale robots with uniform external actuators.
Controlling cell-scale robots with uniform external actuators.